Robotpark EĞİTİM MERKEZİ
BÖLÜM 1 – ROBOTİĞİN TEMELLERİ
Robot Nedir ?
Robot Tipleri (Türleri)
1.SABİT İSTASYON ROBOTLARI
1.1 Robot Kollar – Eklemli Robotlar
1.2.Kartezyen ve Kızak Robotlar
1.3.Silindirik Robotlar
1.4.Küre Robotlar
1.5. SCARA Robotlar
1.6.Paralel Robotlar
2.TEKERLEKLİ ROBOTLAR
2.1 Tek Tekerlekli Robotlar
2.2.Mobil Top Robotlar
2.3.İki Tekerlekli Robotlar
2.4.Üç Tekerlekli Robotlar
2.5.Dört Tekerlekli Robotlar
2.6.Çok Tekerlekli Robotlar
2.7.Paletli Robotlar
3. AYAKLI ROBOTLAR
3.1.Tek Ayaklı Robotlar
3.2.İki Ayaklı Robotlar
3.3.Üç Ayaklı Robotlar
3.4.Dört Ayaklı Robotlar
3.5.Altı Ayaklı Robotlar
3.6.Çok Ayaklı Robotlar
4.YÜZEN ROBOTLAR
5.UÇAN ROBOTLAR
6.SÜRÜ Robotları
7.MODÜLER Robotlar
8.MİKRO Robotlar
9.NANO Robotlar
10.YUMUŞAK ELASTİK ROBOTLAR
Robot Tipleri – Uygulama Alanlarına Göre
BÖLÜM 2 – ROBOT MEKANİĞİ
-4 ÇUBUK (4 BAR) BAĞLANTILARI – Coupler Eğrisi (51010)
-4 Çubuk Mekanizması – HOEKENS Bağlantısı (51011)
-PANTOGRAF Mekanizması – 51012
-Robot Kol – Robot Kıskaç Tasarımı – 11037
Düz Çizgide Hareket Mekanizmaları
-EVANS DÜZ ÇİZGİ Mekanizması (51013)
-PEAUCELLIER CELL – Lipkin DÜZ ÇİZGİ Mekanizması (51014)
-TCHEBİCHEFF DÜZ ÇİZGİ Mekanizması (51015)
-WATT DÜZ ÇİZGİ Mekanizması (51016)
Karışık Link Mekanizmaları
-KANAT ÇIRPMA Mekanizması (51017)
-THEO JANSEN Mekanizması (51018)
Diğer Bağlantı Mekanizmaları
-Paralel Kol Mekanizması – (51023)
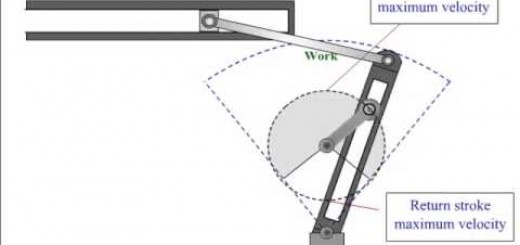
-Kol Sallama Hızlı Dönüş Mekanizması
DİŞLİLER ve DİŞLİ SİSTEMLERİ
Robotik Mekanizmalar – DİŞLİLER ve DİŞLİ ÇEŞİTLERİ (51034)
-Robotik Mekanizmalar – Düz Dişliler 51031
-Robotic Mechanisms – GEARBOXES MOTORS
BÖLÜM 3 – ROBOT ELEKTRONİĞİ
MOTORLAR (DC Motor, SERVO Motor, STEP Motor)
-Dc Motor Nedir ?
-Fırçasız DC Motorlar (51054)
-Gear Motors and Gearboxes
-Step Motorlar (51056)
-Servo Motorlar (51057)